| Abaqus Keywords Reference Guide |
|
| How to find keyword examples |
| Abaqus Keywords Reference Guide |
|
| How to find keyword examples |

This option must be used when defining the seabed for three-dimensional drag chain elements in Abaqus/Standard analyses. For all other cases the preferred options for defining analytical rigid surfaces are the *SURFACE and the *RIGID BODY options.
Products: Abaqus/Standard Abaqus/CAE
Type: Model data
Level: Part, Part instance
Abaqus/CAE: Part module
Set this parameter equal to the name of the element set containing the IRS-type elements or the three-dimensional drag chain elements that may interact with the rigid surface being defined.
The ELSET and NAME parameters are mutually exclusive.
Set this parameter equal to a label that will be used to refer to the rigid surface being created. This surface name is used to define contact interaction with another surface through the *CONTACT PAIR option.
The ELSET and NAME parameters are mutually exclusive.
Set this parameter equal to either the node number of the rigid body reference node or the name of a node set containing the rigid body reference node. If the name of a node set is chosen, the node set must contain exactly one node.
This parameter is relevant only when the NAME parameter is used.
Set TYPE=SEGMENTS to create a two-dimensional rigid surface in the ![]() plane for planar models or in the
plane for planar models or in the ![]() plane for axisymmetric models by defining connected line segments.
plane for axisymmetric models by defining connected line segments.
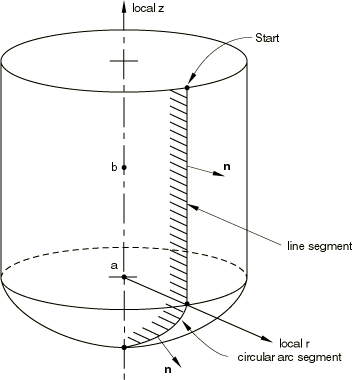
Set TYPE=CYLINDER to define a three-dimensional rigid surface by providing connected line segments and then sweeping them along a specified generator vector.
Set TYPE=REVOLUTION to define a three-dimensional rigid surface by providing connected line segments, which are given in an ![]() plane and are rotated about an axis.
plane and are rotated about an axis.
Set TYPE=USER to define a rigid surface via user subroutine RSURFU.
This parameter can be used with TYPE=SEGMENTS, TYPE=CYLINDER, or TYPE=REVOLUTION to define a radius of curvature to smooth discontinuities between adjoining straight-line segments, adjoining circular-arc segments, and adjoining straight-line and circular-arc segments. It has no effect on rigid surfaces defined with TYPE=USER.
First line:
The “word” START.
Global X-coordinate or r-coordinate of the starting point of the line segments.
Global Y-coordinate or z-coordinate of the starting point of the line segments.
Second and subsequent data lines define the various line, circular, and parabolic segments (see below for their format) that form the profile of the rigid surface.
First line:
Global X-coordinate of point a, the origin of the local ![]() system (see Figure 17.19–1).
system (see Figure 17.19–1).
Global Y-coordinate of point a, the origin of the local ![]() system.
system.
Global Z-coordinate of point a, the origin of the local ![]() system.
system.
Global X-coordinate of point b on the local x-axis.
Global Y-coordinate of point b on the local x-axis.
Global Z-coordinate of point b on the local x-axis.
Second line:
Global X-coordinate of point c on the local cylinder generator vector.
Global Y-coordinate of point c on the local cylinder generator vector.
Global Z-coordinate of point c on the local cylinder generator vector.
Third line:
The “word” START.
Local x-coordinate of the starting point of the line segments.
Local y-coordinate of the starting point of the line segments.
Fourth and subsequent data lines define the various line, circular, and parabolic segments (see below for their format) that form the profile of the rigid surface.
First line:
Global X-coordinate of point a, the origin of the local ![]() system (see Figure 17.19–2).
system (see Figure 17.19–2).
Global Y-coordinate of point a, the origin of the local ![]() system.
system.
Global Z-coordinate of point a, the origin of the local ![]() system.
system.
Global X-coordinate of point b on the symmetry axis (the local z-axis).
Global Y-coordinate of point b on the symmetry axis (the local z-axis).
Global Z-coordinate of point b on the symmetry axis (the local z-axis).
Second line:
The “word” START.
Local r-coordinate of the starting point of the line segments.
Local z-coordinate of the starting point of the line segments.
Third and subsequent data lines define the various line, circular, and parabolic segments (see below for their format) that form the profile of the rigid surface.
Data line to define a straight line segment:
The “word” LINE.
x-coordinate of the endpoint of the line.
y-coordinate of the endpoint of the line.
Data line to define a circular arc segment (the arc must be less than 180°):
The “word” CIRCL.
x-coordinate of the endpoint of the circular arc.
y-coordinate of the endpoint of the circular arc.
x-coordinate of the center (origin) of the circular arc.
y-coordinate of the center (origin) of the circular arc.
Data line to define a parabolic arc segment:
The “word” PARAB.
x-coordinate of the middle point along the parabolic arc.
y-coordinate of the middle point along the parabolic arc.
x-coordinate of the endpoint of the parabolic arc.
y-coordinate of the endpoint of the parabolic arc.
For rigid surfaces created with TYPE=SEGMENTS, the x- and y-coordinates are the global X- and Y-coordinates or r- and z-coordinates. For rigid surfaces created with TYPE=CYLINDER, the x- and y-coordinates are the local x- and y-coordinates. For rigid surfaces created with TYPE=REVOLUTION, the x- and y-coordinates are the local r- and z-coordinates.
Figure 17.19–1 *RIGID SURFACE, TYPE=CYLINDER.
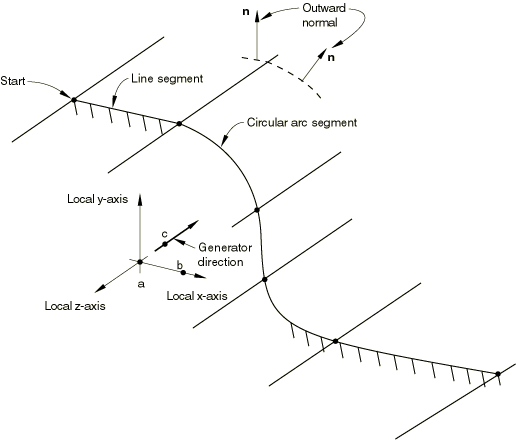
Figure 17.19–2 *RIGID SURFACE, TYPE=REVOLUTION.